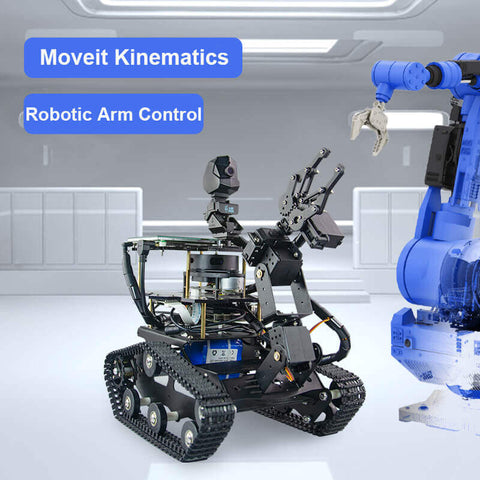
Jetson Nano Ros Slam Radar-Roboterauto mit 7-Zoll-Touchscreen

Beschreibung der Funktionen:
- Farberkennung;
- Autopilot;
- Mobiles Tracking;
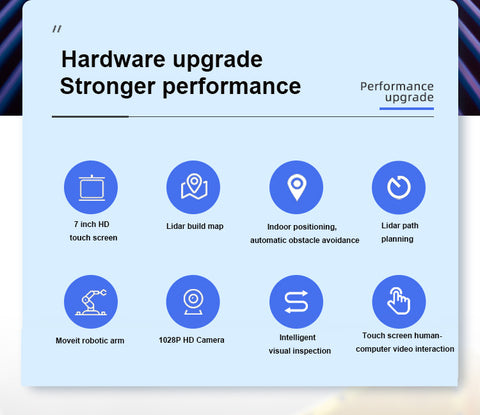
- Visuelle Hindernisvermeidung;
- Lidar-Gebäudekarte;
- Automatische Hindernisvermeidung für die Indoor-Positionierung;
- 4-DOF mechanischer Arm;
- Pfadplanung von Lidar;
- Kamera-Sichtkontrolllinie;
- Feedback zum ROS-Kilometerstand
Produktparameter:
- Hauptsteuerplatine des ROS-Roboters: JETSON NANO
- Programmiersoftware: Python, C++
- Karosseriegröße: Länge 310 mm x Breite 240 mm x Höhe 360 mm
- ROS-Version: ROS Melodic
- Radar: Rplidar A1
- Netzwerkkarte: Intel8625
- Gewicht: ca. 4 kg
- Roboterarm: Anti-Blockier-Mechanikarm mit vier Freiheitsgraden
- Länge: 310 mm (Gesamtlänge der Klaue im geschlossenen Zustand).
- Batterie: 8400 mAh Lithiumbatterie mit Ladeschutz
- Kamera: 1080 HD-Kamera
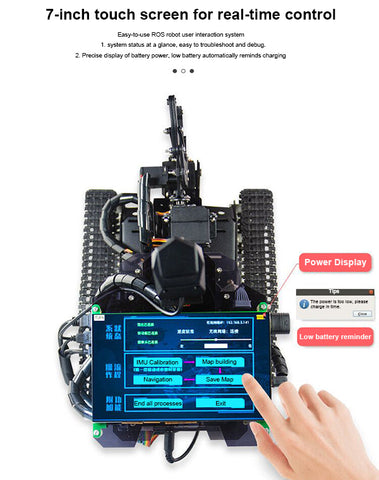
- Spannungsanzeige: Fenster
- Elektrische Maschinen: DC-Bürstenmotor (mit 360-Zeilen-AB-Code)
-
Motordrehmoment: Einzeln 3,5 Nm
-
Maximales Greifgewicht: 50 g
-
Maximales Öffnen und Schließen der Klaue: 50 mm
- IMU: Neun-Achsen-Gyroskopsensor
- Bildschirm: 7" 1080P HD-Touchscreen (kapazitiver Touchscreen)