
Guide

Basic Operation Manual V1.0 for Raspberry Pi DS/GFS/TH robot
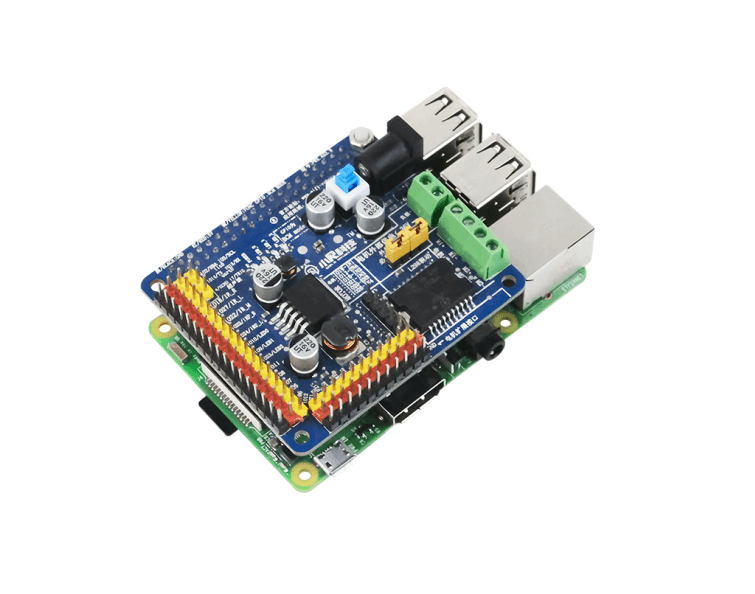
External power supply: the motor and servo of the driver board support the external power supply mode, when the internal current or voltage of the driver board is not enough to support the external power supply mode. To meet the needs of the motor and servo, a qualified power supply can be introduced into the circuit via an external power supply interface and supplied directly to the motor or servo. servos, but the control signal still comes from the main Raspberry Pi chip, thus achieving the need to control high-power motors or servos.