
Descripción de WIFI/Bluetooth Smart Car Robot Driver Board
La foto del tablero del conductor:
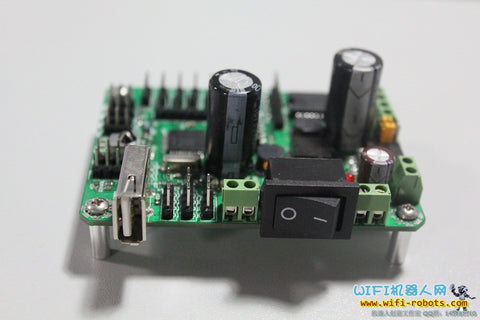

En comparación con una pluma estilográfica, muy mini: 
Foto de funcionamiento con batería de litio de 12V:
(Versión verde)

(Versión azul)
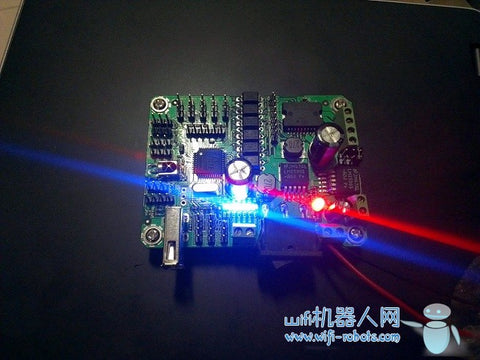
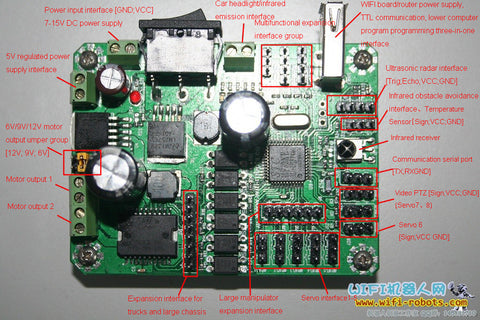
Diagrama de descripción de la interfaz:
Características de los recursos de hardware de la placa de controlador:
- procesador MCU
--STC11F32XE, Flash de 32K, SRAM de 1280 bytes, oscilador de cristal integrado de 22,1184 MHz, en comparación con la microcomputadora de un solo chip 51 tradicional, tiene las siguientes características:
1) Bajo consumo de energía, fuerte anti-interferencia y súper encriptación;
2) Admite el modo 1T, la frecuencia principal de 22,1184 MHz es aproximadamente equivalente a 265 MHz de una microcomputadora tradicional de un solo chip;
3) Admite la tecnología IAP, se puede usar un espacio EEPROM de 29K para guardar los datos del usuario;
4) Dispone de un generador de baudios independiente.
- Chip de accionamiento del motor
--L298, circuito de accionamiento de puente completo doble incorporado, puede impulsar 2 motores de CC, también puede impulsar motores paso a paso de dos fases, corriente de accionamiento estándar 2A, nuevo paquete SMT importado, el rendimiento es mucho mejor que el paquete de complemento doméstico L298, el precio también es mucho más caro.
Paquete doméstico enchufable L298
- Regulación de voltaje de fuente de alimentación dual
Esta placa controladora viene con un sistema de estabilización de voltaje de dos canales, que puede estabilizar la entrada de alimentación de CC de 7-16 V a 5 V y otros voltajes para que los use el equipo externo del robot. En comparación con otras placas de controlador y placas de controlador Arduino, estas placas de controlador no son estables. Para el sistema de presión, el usuario necesita bajar la entrada de presión por sí mismo, lo cual es muy problemático.
--2 piezas de LM2596, que admiten respectivamente una salida de unidad de corriente de 3A, nuevos chips importados, bajo calor, el rendimiento y el precio son mucho más altos que los chips nacionales
- Recursos y características de la interfaz
1) 1 interfaz de salida de motor, configuración estándar para accionar 2 motores de CC (también se pueden accionar en paralelo 4 canales de motores de baja corriente) y motores paso a paso opcionales
2) 1 interfaz de control lógico de expansión del motor, utilizada para controlar un chasis de motor externo de alta potencia (como un motor de pie grande);
3) 5 interfaces de accionamiento del mecanismo de dirección (se puede ampliar a 8 canales);
4) 1 grupo de interfaz de control de lógica extendida de servo, utilizado para controlar el servo de superpotencia externo;
5) 3 interfaces de evitación de obstáculos infrarrojos;
6) 1 puerto serial de encabezado de pin TTL;
7) Un receptor integrado de infrarrojos;
8) 4 interfaces reservadas, que se pueden conectar al sensor de temperatura, módulo ultrasónico, módulo FM con interfaz I2C, etc.;
9) 1 interfaz USB, perfectamente adaptada a enrutadores inalámbricos como el 703, integra fuente de alimentación de 5V y puerto serie TTL, y también se puede conectar a un módulo de puerto serie externo, como un módulo de huellas dactilares, etc.;
10) 1 interfaz de unidad con una salida máxima de 500 mA, que se puede conectar a un transmisor de infrarrojos, zumbador, diodo de luz fuerte, relé, etc.;
11) 1 interruptor de encendido, corriente de trabajo 8A, súper confiabilidad;
12) 1 interfaz de entrada de alimentación de CC, entrada de rango de 7-15 V;
13) Interfaz de salida de voltaje de 1 5V, corriente estándar de 1A;
14) Interruptor de puente de selección de voltaje de accionamiento del motor, salida opcional de 6V/9V/12V.
15) 6 grupos de indicadores de funcionamiento LED brillantes.
16) Las partes lógicas clave están aisladas por optoacopladores, lo que mejora en gran medida la estabilidad.
17) Puede usar el programa de descarga STC-ISP para programar en línea.
Declaración especial: hay pines marcados como VCC GND PWM en la parte posterior de la placa del controlador. Asegúrese de reconocer y conectar el cableado. Además, la entrada de voltaje, el nivel TTL y otros parámetros deben marcarse de acuerdo con el icono de la placa del controlador.