
Manual de funcionamiento básico del robot Raspberry Pi ROS V1.0
1. La placa de transmisión y la descripción de la interfaz

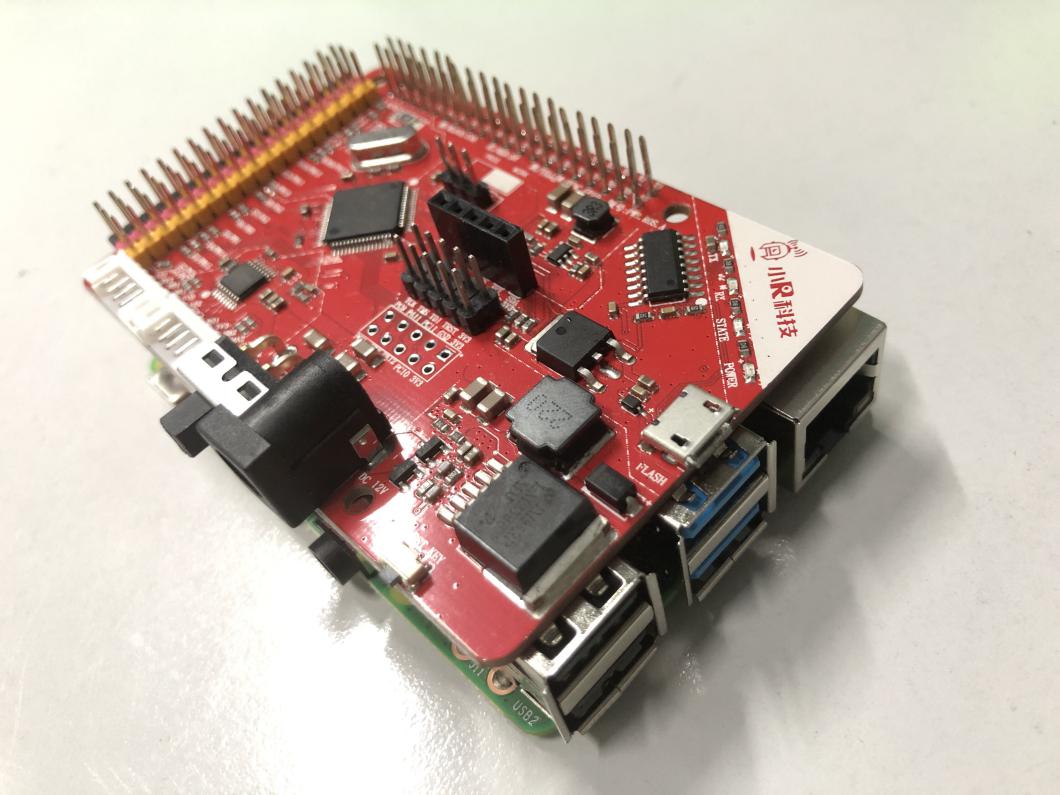
Combinación de placa controladora y Raspberry Pi

Diagrama de conexión del circuito general del robot Raspberry Pi ROS

Descripción general de la interfaz de la placa de control del robot de radar PWR.ROS.A
PWR.ROS.A Robot Driver Board es un ROS Radar Car Robot Driver Board para Raspberry Pi 3B+/4B /Jetson Nano. Sus funciones principales incluyen:
1, función de regulador: puede cambiar el voltaje de entrada de 7-12 V CC a 5 V u otro voltaje, se utiliza para alimentar el chip principal o impulsar el motor y otros equipos externos.
2, accionamiento del motor: el motor es impulsado por el chip de accionamiento del motor para impulsar el motor hacia adelante, hacia atrás, detener, acelerar y desacelerar.
3, servoaccionamiento: la placa de controlador con interfaz de salida de servoaccionamiento de 8 vías, en el uso de voltaje interno a la fuente de alimentación del servo, puede conducir simultáneamente 8, la corriente máxima no supera los 100mA PWM servo.
4, la unidad del sensor: la placa del controlador no está ocupada por el GPIO, se conduce directamente a la parte inferior de la Raspberry Pi y está marcada con pines amarillos, cada grupo de GPIO son pines de fuente de alimentación de 5V y GND, marcados en rojo y negro.
5, adquisición de datos del sensor: incluida la velocidad del motor, giroscopio IMU y otros datos clave.
2、Instrucciones básicas para el usuario
(Cuando el robot está ensamblado) Conecte la fuente de alimentación a la interfaz de alimentación de la placa del controlador, la especificación de la fuente de alimentación es un voltaje de CC de 12-15 V, con una corriente de al menos 3 A; especificaciones de interfaz de potencia de 5.5-2.1.
2. Cuando se enciende el interruptor de alimentación, los LED de la placa del controlador y Raspberry Pi se iluminan, y los datos de arranque se pueden ver en la pantalla.

2. Cuando se enciende el interruptor de alimentación, los LED de la placa del controlador y Raspberry Pi se iluminan, y los datos de arranque se pueden ver en la pantalla. 
Cuando aparece la siguiente interfaz XR-ROS HCI en la pantalla LCD, indica que se ha activado.

3. Introducción al sistema XR-ROS HCI
El sistema XR-ROS HCI tiene tres partes, que son el estado del sistema, el proceso de operación y funciones adicionales. Las funciones correspondientes se muestran en la siguiente tabla.
|
Atributos |
Funciones |
notas |
|
Estado del sistema |
Detecta el estado de conexión del radar, la placa del controlador y la cámara y muestra el estado actual de la red. |
|
|
Procedimiento de operación |
Incluir calibración IMU-->Crear mapa-->Guardar mapa-->Navegación |
Sin cambiar el entorno en el que opera el robot, en teoría, la calibración de la IMU solo se requiere una vez. |
|
Funciones adicionales |
Finalice todos los procesos y salga del sistema interactivo. |
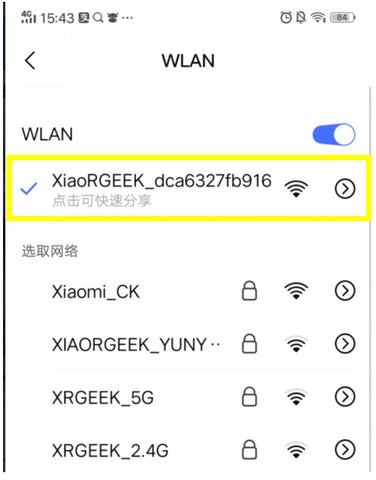
4. Encienda la función WLAN de su teléfono, busque la señal WiFi circundante, encuentre la señal inalámbrica que comienza con XiaoRGEEK y conéctese.
5. Agregar dispositivos robóticos
Abra la aplicación cuando esté conectado al punto de acceso wifi del robot. Cuando inicia la aplicación por primera vez, la aplicación puede solicitar permiso, seleccione "Aceptar". Luego siga las instrucciones de la aplicación para agregar su robot. Como se muestra en la imagen de abajo. 
Como usuario, lo único que debe cambiar es la opción Master URI , que es la dirección IP del robot. Este valor es la "IP wifi" que se muestra en el estado del sistema del sistema XR-ROS HCI. No se recomienda cambiar los parámetros en Mostrar más configuraciones , ya que son los mismos que se muestran en Estado del sistema . El firmware coincide y, una vez modificado, el software tendrá errores incontrolables. Mostrar más configuraciones La siguiente figura muestra.

6. Calibración de la IMU
Para calibrar la IMU (sistema de giroscopio) cuando utilice el robot ROS por primera vez, haga clic en el botón "Calibración de la IMU" en la sección "Procedimiento operativo" del sistema XR-ROS HCI y espere a que el robot indique que la calibración ha finalizado. terminado. Calibración de IMU Esto generalmente solo se necesita una vez, y la operación de calibración se puede realizar nuevamente cuando el robot experimenta desviaciones severas de navegación.

7.Construir mapas electrónicos
En entornos desconocidos, los robots necesitan crear mapas electrónicos a través de LIDAR para proporcionar datos de referencia para los esfuerzos de navegación posteriores. El mapa creado se guardará en el sistema del robot y, si la operación de creación de mapas se vuelve a realizar, el nuevo mapa sobrescribirá el anterior. uno. Por supuesto, también puede guardar varios mapas al mismo tiempo a través del desarrollo por su cuenta.
Haga clic en el botón "hacer un mapa" en el sistema XR-ROS HCI, y el sistema XR-ROS HCI le indicará el mensaje "Complete el mapa en la aplicación".

En este punto se activará el ícono wifi en la opción Robot de la APP, como se muestra en la siguiente imagen.

Haga clic en la opción de robot, la aplicación ingresa a la página de control y luego seleccione la esquina superior izquierda de la aplicación "haga clic aquí para cambiar de página", seleccione la opción "mapa de construcción", la aplicación ingresa al estado del mapa de construcción.

En el estado de creación de mapas, si su robot tiene una cámara instalada, puede ver el video capturado por la cámara en la pantalla de inicio, ahora puede usar el joystick en la esquina inferior izquierda de la aplicación para controlar el robot para caminar a través de la sitio de trabajo actual, en la esquina superior derecha de la aplicación puede ver los resultados del escaneo de radar del robot y generar un mapa del área circundante, también puede hacer clic en la posición superior derecha para cambiar entre la interfaz de control y la interfaz de vídeo
8 .Guardar mapa
Después de que el robot adquiere los datos del mapa en el estado de construcción del mapa, necesita guardarlo, y nuestro robot tiene dos formas de guardar el mapa.
①. En la pantalla "Crear mapa", toque el punto rojo en la esquina inferior derecha para mostrar las opciones "Actualizar mapa" y "Guardar mapa", seleccione "Guardar mapa".
②.Haga clic en el botón "Guardar mapa" en la página "Procedimiento operativo" del sistema XR-ROS HCI.

Nota: La función de guardar mapa en la aplicación solo se realiza en el modo de creación de mapas.
9. Navegación autónoma
Después de crear un mapa de una ubicación específica, puede experimentar el efecto de navegación.
Haga clic en el botón "Navegación" en el sistema XR-ROS HCI y luego cambie a la opción "Navegación" en la interfaz de usuario de la aplicación.

①、Primero, configure el punto de inicio de acuerdo con la posición actual del robot, en la interfaz de "Navegación", seleccione la opción "Establecer punto de inicio" en la esquina inferior izquierda, luego presione y mantenga presionado en el mapa, y luego arrastre su dedo a la dirección general de la nariz del robot, aparecerá un cursor de flecha azul en la aplicación, la dirección de la flecha es la dirección de la nariz del robot, el punto de inicio no tiene que ser muy preciso, pero cuanto más preciso sea el es el punto de inicio, más rápido entrará el robot en el estado de navegación autónoma.

En la interfaz de "Navegación", seleccione la opción "Establecer punto de navegación" en la esquina inferior izquierda y luego en la pantalla de la aplicación. En el mapa, seleccione el destino al que desea que llegue el robot y manténgalo presionado, luego manténgalo presionado hacia la parte delantera del automóvil cuando desee que el robot llegue al destino. Arrastre su dedo y aparecerá un cursor de flecha azul en la APLICACIÓN, la flecha apunta en la dirección de la parte delantera del robot cuando llega a su destino. Ajuste la dirección, suelte el dedo y el robot trazará automáticamente el camino a su destino y lo ejecutará. Si encuentra un obstáculo inesperado a mitad del viaje, el robot redirigirá una nueva ruta a su alrededor.

3. Primeros pasos para el desarrollo
1.Herramientas de desarrollo de uso común
Putty: se utiliza para iniciar sesión de forma remota en el sistema Raspberry Pi a través de SSH para ejecutar comandos.
Winscp: se utiliza para conectarse de forma remota al sistema Raspberry Pi para transferir archivos.
SDFormatter: se utiliza para formatear la tarjeta TF antes de grabar la imagen en la tarjeta TF.
Win32DiskImager: se utiliza para grabar la imagen del sistema en la tarjeta TF o leer la imagen completa de la tarjeta TF para hacer una copia de seguridad.
2.Imagen del sistema de grabación
Nota: si está utilizando la tarjeta TF que viene con el producto, entonces hay una imagen de sistema de robot integrada en la tarjeta TF, si está utilizando su propia tarjeta TF en blanco, o si hay un problema con la imagen original, entonces debe descargar la imagen del sistema del robot en la tarjeta TF nuevamente. El tutorial de grabación de imágenes del sistema es el siguiente.
①.Inserte la tarjeta TF en el lector de tarjetas y luego inserte el lector de tarjetas en el puerto USB de la computadora, en este momento puede ver que la computadora ha sido reconocida como una tarjeta TF del dispositivo de almacenamiento USB.
②.Utilice SDFormatter para formatear la tarjeta TF.
③.Utilice Win32DiskImager para escribir la imagen del sistema del robot en la tarjeta TF.
3.Arquitectura del sistema