
Llevarlo al automóvil robot WIFI: para comprender los principios básicos
El coche robot WIFI es el sueño de la infancia de muchas personas, mi deseo de un coche robot WIFI proviene del coche de control remoto de vídeo en el "hogar de los niños", en ese momento pensé que sería genial si algún día pudiera hacer mi propio robot wifi auto. Hasta ahora, he realizado mi sueño de la infancia y he hecho muchos autos robot por mi cuenta.Pero, ¿qué sucede si la mayoría de los principiantes, que no son especialistas en electrónica o informática, están interesados en autos robot inteligentes controlados por WIFI/Bluetooth? Es cierto que para una persona con la profesión equivocada, está compartimentado, pero no importa, primero déjame contarte algo sobre los principios del coche robot.
Dado que el Bluetooth Smart Car y el WIFI Smart robot car son muy similares, pero con el módulo WIFI reemplazado por un módulo Bluetooth, el Bluetooth Car no se explicará en detalle.
Nuestro automóvil robot inteligente WIFI utiliza un enrutador + PC o teléfono móvil o método de control web. Su principio básico se divide en 4 grandes bloques:
1, convierta un enrutador inalámbrico ordinario en una pequeña computadora que ejecute Linux introduciéndolo en el sistema OpenWrt de código abierto.
¿Qué es OpenWRT? 1. Acerca de OpenWrt Cuando Linksys lanzó el código fuente de WRT54G/GS, había muchas versiones diferentes de firmware en Internet para mejorar la funcionalidad original. La primera es que es difícil combinar las fortalezas de cada versión de Firmware, y la segunda es que esta versión se aleja cada vez más de la distribución oficial de Linux. OpenWrt eligió un camino diferente, comenzó desde cero, agregando software poco a poco, acercándolo a la versión de firmware de Linksys. Velocidad de desarrollo.
En pocas palabras, es una actualización del código fuente de enrutamiento de Cisco, un pequeño sistema Linux para enrutadores con ciertos chips, con este sistema, nuestro enrutamiento ya no es tan simple como navegar por Internet, podemos instalar varios programas y controladores en él, usando enrutamiento como plataforma, los usuarios pueden cargar cámaras USB, tarjetas de red, tarjetas de sonido, etc.
Tenemos un programa ejecutándose en nuestra placa WIFI, llamado mjpg-streamer, que codifica el video de la cámara USB y lo devuelve a la computadora host a través de WIFI, para que podamos ver el video del automóvil robot.
Al mismo tiempo, el enrutamiento generalmente tiene un puerto serial TTL reservado, el puerto serial TTL se usa para depurar o cepillar, sacamos este puerto serial TTL y luego, a través del software Ser2net instalado dentro del enrutamiento, podemos transferir los comandos desde el canal WIFI hasta la salida del puerto serie, y la función del puerto serie aquí es comunicarse con el chip del microcontrolador MCU para que el microcontrolador sepa qué acción quiere que haga el usuario.
Módulo WIFI (enrutamiento) de coche robot:

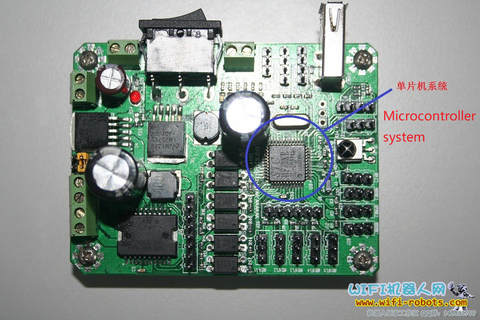
2 、 sistema de un solo chip y computadora descendente
El sistema de microcontrolador también es el sistema informático pequeño más simple, pero su frecuencia es muy baja, no es adecuada para big data, su función principal es controlar el nivel de sus pines de salida (puerto IO), de modo que el chip del controlador del motor impulse el motor hacia adelante o hacia atrás, para lograr que el robot avance y retroceda.
Llamamos al programa que se ejecuta dentro del sistema del microcontrolador como la unidad inferior, la función de este programa es recibir instrucciones de la unidad superior, y decodificar y analizar para comprender qué tipo de acción envía el usuario, y luego dejar que los pines designados del chip del microcontrolador para asignaciones de alto y bajo nivel, por supuesto, la unidad de envío superior de esta instrucción es el módulo WIFI, que es el enrutamiento, y luego el nivel superior es la PC/teléfono móvil y otros terminales de control, que es la unidad superior.
Esta es la primera vez que veo una PC o un microcontrolador con un puerto serie TTL, y nunca he visto una PC o un microcontrolador con un puerto serie TTL.
Además del puerto serie TTL, hay un puerto serie llamado nivel RS232, también conocido como puerto serie de 9 pines, es decir, el puerto serie detrás de la computadora de escritorio ordinaria, el nivel de este puerto serie no es TTL, por lo que el La depuración no puede usar directamente este puerto serie y nuestros diversos módulos para comunicarse, debemos comprar 232 a la placa de nivel TTL.
Sistemas de microcontrolador de coche robot (MCU):
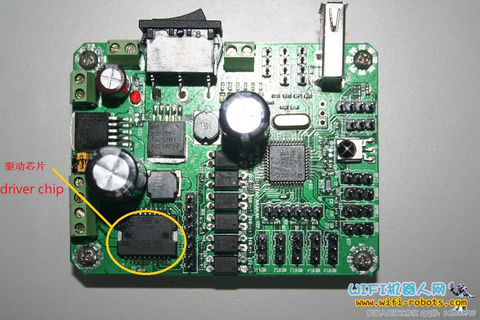
3, circuito de accionamiento del motor
Como dije anteriormente, el microcontrolador puede analizar las instrucciones enviadas por la computadora superior, juzgando las instrucciones, y luego permitir que un nivel de pin suba o baje, pero la corriente de salida del pin del microcontrolador es muy pequeña, puedes hacerlo ligero Luces LED, pero conducir nuestro cuerpo grande es imposible, por lo que necesita un chip de controlador para impulsar el funcionamiento del motor, es decir, el microcontrolador con el nivel de pin de la forma de decirle al módulo de controlador, por ejemplo, el pin del microcontrolador P10-P13 es 1010, el módulo del controlador emitirá dos voltajes directos, el automóvil hacia adelante, si es 0101, el automóvil retrocedió.
Módulo de circuito de accionamiento de coche robot:
4, cargador
La computadora superior es la parte que envía los comandos, enviamos los comandos al módulo/router WIFI a través de la computadora superior, luego a través de la conversión del enrutador, los comandos se envían al microcontrolador para que el robot ejecute nuestros comandos, al mismo tiempo. vez que la computadora superior envía una solicitud de video al enrutador, el procesador de video en el lado de enrutamiento envía el video de la cámara USB adquirido a la computadora superior, la computadora superior lo decodifica y lo muestra.
La computadora superior en realidad está escrita para enviar datos al lado de enrutamiento con una conexión de socket a través de TCP/UDP y otros métodos de comunicación, donde nuestra computadora superior está en modo Cliente y el lado de enrutamiento es en modo servidor, lo que tiene la ventaja de que no requieren cualquier operación de reenvío, y podemos conectarnos directamente al robot de carro inteligente WIFI para manipularlo.
Bien, para resumir: todo el coche robot inteligente funciona como se muestra a continuación:

Finalmente, busque el sitio web: www.xiaorgeek.com de robot car como referencia